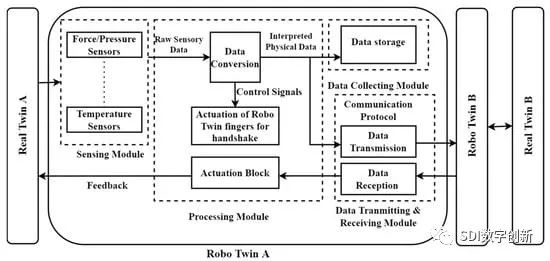
随着元宇宙的引入,数字沉浸式技术的发展得到了加速。这项技术有望通过为互联网用户提供完全身临其境的体验来缩小物理世界和虚拟世界之间的差异。人类是社会性动物,身体接触对我们的幸福感起着重要作用。迈克尔·格里夫斯 (Michael Grieves) 介绍了数字孪生的概念。数字孪生是可操作的,这意味着该模型可以模拟施加到模型本身元素的外力影响。对于数字孪生以个体之间交互的形式提供身临其境的体验,需要提供能够与虚拟完美结合的“物理身体”。Digital Twin 的这种物理表示,在研究中被称为 Robo Twin,也就是应该有一个感觉尽可能接近人类身体的身体和捕捉触摸相关信息的能力,因此,触觉和机器人领域开始围绕触摸的概念进行融合。近年来,人机交互 (HRI) 越来越受到研究界的关注。在真实世界中,两人之间在各种社交场合中经常采用的一种自然行为是握手。握手通常是社交环境中最初的非语言交流,有助于建立语气和塑造第一印象。因此,这是人们参与的一种极其重要的社会行为,因此,对于机器人来说,能够复制这种行为极为重要。人与机器人握手的概念框架将握手分为三个阶段:伸手、握手、握手和同步。一项研究利用小波变换来彻底评估握手的物理特性,例如人体手臂的加速度。结果发现,握手阶段可以使用小波尺度图分析进行定性描述。此外,该研究还测量了人类握手的定量方面,例如持续时间、握力和有节奏运动的速率。可穿戴触觉测量手套 (HMG) 的设计,其中握手的惯性和力数据,为现实的人机交互创建提供了有效的控制算法。基于现有的人机握手分析,并受人手解剖学的启发,一些作者设计并实现了类似于人手的机器人末端执行器,以真实地产生人机握手。然而,这些设计并不接近类人身体,因为它们使用了现有的机器人手臂。类人机器人是非常复杂的拟人化机器,并具有使用与人类相同环境的能力。由于具有类人的身体运动对于 HRI 的采用至关重要,现有的类人机器人,如 ASIMO、HRP-1、HRP-2、HRP-3, HRP-4, HOAP-1, NAO 机器人和 HBS-1,可以用作数字孪生物理表示的构建平台。然而,这些先进的人形系统价格昂贵且更加复杂。将增材制造技术结合到人形机器人的设计和制造中是降低其成本的有前途的解决方案。不少研究针对各种应用提出了拟人化机械手的定制 3D 打印设计,采用各种欠驱动设计技术。开源 Inmoov设计似乎是机械手的最佳选择,因为该设计可以轻松定制。结合现有设计,该研究提供了类人机器握手系统的建议框架。传感模块:该模块在系统通电后立即激活。该模块执行的主要任务是在与 Robo Twin 的手接触时感测来自 Real Twin 的原始感官数据,执行握手。传感器接收到的所有原始信号随后被发送到处理模块,在那里它们被控制器转换为相应的物理值。处理模块:该模块通过将接收到的来自传感器的原始模拟信号转换为有意义的解释物理数据来执行处理。它还会在从另一个 Robo Twin 的处理模块接收到处理后的数据后启动执行器。此外,更重要的是,一旦从位于 Robo Twin 手上的力传感器接收到任何非零信号,它就会生成用于向内抓住对象手的控制信号。这些控制信号会启动 Robo Twin 手上每个手指的伺服电机,以抓住对象的手进行握手。当对象从 Robo Twin 手上的力传感器撤回接触时,它会生成 Robo Twin 手指向外抓握动作的控制信号,从而松开用户的手并结束握手。该处理模块在执行上述所有任务的同时,将处理后的传感数据同时发送给数据采集模块和数据收发模块进行实时记录和传输。数据收集模块:系统架构的这一部分负责在 Robo Twin 与用户进行握手时实时记录传感数据。该模块由处理模块的输出触发,即一旦解释的物理数据可用。数据传输和接收模块:该模块在两个 Robo Twin 手臂之间建立通信,以同时双向传输传感数据。
全部评论